Autonomous driving is among the most demanding road applications. It requires high accuracy coupled to a high level of integrity. Furthermore, the environment in which it operates is much harsher than its counterparts in other domains like aviation or maritime...
This combination of requirements puts autonomous guidance systems in a situation where its assessment, certification and type-approval are very complex. New methodologies are clearly needed to be able to tackle the upcoming PPP (Precise Point Positioning) or NRTK (Network Real Time Kinematic) techniques.
The WG1 'Navigation and positioning receivers for road applications' of CEN/CLC JTC5 ‘Space’, whose Secretariat is currently held by BNAE (AFNOR), has been developing a standardization framework for assessing GNSS-based positioning systems. This framework relies on the EN16803 series on the use of GNSS-based positioning for ITS and on-going projects led by the WG1.
Since September 2020, the first version of the EN 16803 series is available. The first three parts describe a methodology to assess GNSS devices based on Record & Replay (also known as Record and Playback). Part-1 is dedicated to ‘Definitions and system engineering procedures for the establishment and assessment of performances’, Part-2 to ‘Assessment of basic performances of GNSS-based positioning terminals’, and finally Part-3 to ‘Assessment of security performances of GNSS-based positioning terminals’. Part-2 and Part-3, JTC5-WG1 aims to propose operational methods to test in laboratory GNSS-based positioning systems. Considering Part-3 focuses on jamming and spoofing issues, while it is strictly forbidden to use jammers or spoofers in real life, alternative simulation techniques coupled to playback are proposed.
Miguel Ortiz, Convenor of JTC5/WG1 and EN 16803 series Project leader , commented: “Today, we are proud to see GNSS/GPS Geolocation Testing Laboratory like the GUIDE laboratory are already using the EN16803 series to assess GNSS receivers and to issue test reports only a couple of months after the publication of Part-2 & Part-3.”
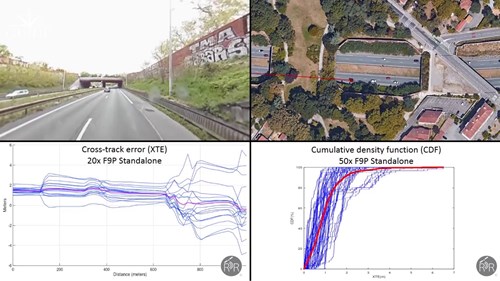
In practical terms, laboratories wishing to evaluate the performances of a GNSS device can use EN 16803, for instance, to assess "cross-track" accuracy (one metric among others). To do that, they have to replay a GNSS scenarios. Through one playback, producing one blue cross-track error in the example below (bottom left), it is possible determine the overall performance by averaging CDF (red trace, bottom right below). This CDF is specified in EN16803 to extract the key values (50-75-95 percentiles) used to classify the performance of the GNSS receiver. For instance, it is possible to visualise the result for 50 replays of a ublox F9P.
In addition to the recent publication of EN 16803 Parts 1, 2 and 3, JTC5/WG1 has been busy with the GPSTART2 project. This EC-funded project tackles positioning issues for autonomous driving applications (High Accuracy Service, and Integrity), and aims at complementing the current EN series with a new part dedicated to design of assessment scenarios. In order to achieve this challenging target, a European consortium bringing together GUIDE laboratory (FR), Technische Universität Braunschweig (DE), Radiolabs (IT), M3 Systems (BE) has been chosen. Four work packages have been defined and will lead to the publications of technical reports and technical specification related to:
- ‘Record & Replay scenario’: design and validation methodologies,
- ‘PVT error model’, or how to evaluate ‘End To End’ ITS application (Key Performance Indicators),
- ‘Integrity management on road applications’, from its definition to the way to verify it,
- ‘Assessment of hybridized GNSS device’ in laboratory in a certification framework.
The project will end in 2021.
To conclude, the EN 16803 series aim at providing new methodologies enabling fair and affordable metrological comparisons between GNSS-based positioning systems. This can be achieved by replaying validated scenarios that contain real GNSS signals (and potentially additional sensors) recorded with a great accuracy. Moreover, EN16803 is designed to comply with the new type approval scheme needed for autonomous driving applications, which are very demanding in term of accuracy and integrity.
The complete standard portfolio of JTC5 is available here.




